Ma première radio fut une Futaba. Assez sympa, sortie de sa boite avec son récepteur, elle avait une relation assez simple avec les servos. A chaque manche ou bouton correspondait une voie sur le récepteur, et l’action sur un manche qui déclenche le mouvement d’un servo était assez satisfaisante et rassurait le débutant que j’étais.
Ma seconde radio a été une FrSky taranis x9d+. On passait de 8 à 16, voire 32 voies, beaucoup plus d’entrées telles que boutons, sliders, … Mais on passait aussi d’un truc qui fonctionne dès sa sortie de la boite à un truc qu’il faut paramétrer pour qu’il fonctionne. Et ce ne fut pas évident.
Companion
Première grande différence, on peut connecter la radio à un ordinateur, pour la mettre à jour et/ou la programmer. Le logiciel à installer s’appelle Companion. Il est simple de prise en main, permet de télécharger les mises à jour de la radio, et permet de programmer la radio. En plus de programmer la radio, il permet aussi de simuler la radio et de voir le résultat des actions sur les manches et boutons.
On va pouvoir apprendre sans casser de matériel, mais le modèle, lui, est toujours immobile.
Entrées, sorties et mixages
Le premier concept important dans OpenTX, c’est la relation qui existe entre les entrées et les sorties. D’une expérience assez limitée avec les autres marques de radio, je ne m’aventure pas a expliquer la différence.
Une entrée, c’est un bouton ou un stick sur la radio. Un élément sur lequel l’utilisateur agit. Une sortie, c’est un connecteur sur le récepteur pour y brancher un élément du modèle réduit, un servo, un contrôleur de vitesse, …
Pour faire le lien entre ces entrées et ces sorties, il existe le concept de mixage. Pour que l’action sur un manche fasse bouger un servo, il faut que l’entrée, le manche, soit reliée à la sortie, le servo, par un mixage. Prenons le cas du servo de direction d’un véhicule, on souhaite que toucher le manche de direction fasse bouger le servo de direction, à la même vitesse que le manche et dans la même direction.
Première chose a faire, déclarer l’entrée. On pourrait éviter cette étape, mais c’est une bonne pratique de ne pas l’éviter car cela sera utile plus tard. L’entrée sera donc « uniquement » la déclaration de quel élément physique de la radio on va utiliser. Ici, Dir pour la direction.
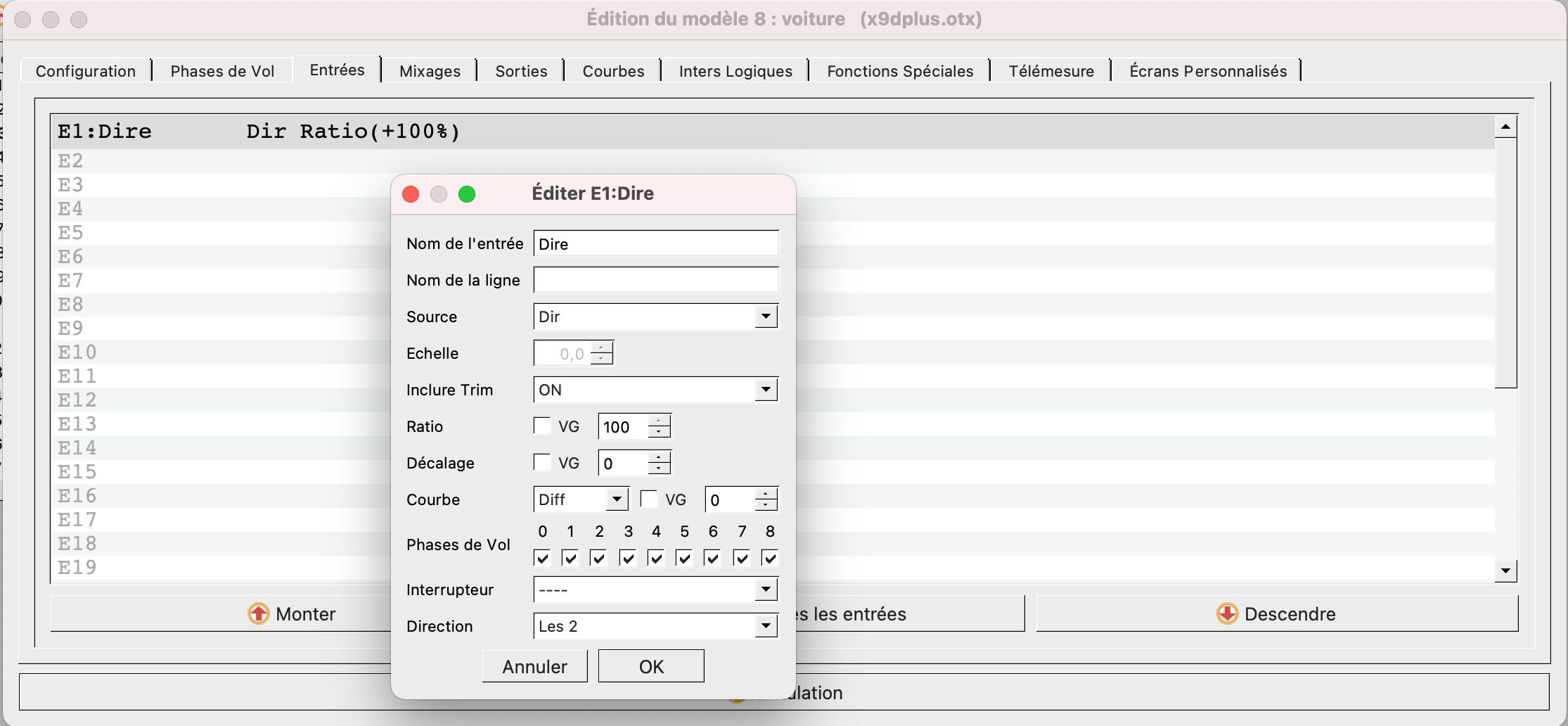
On lui donne un nom Dire qui la distinguera de Dir, l’élément physique. La source, Dir, l’élément physique. On choisit si l’on utilise les trim ou non, un ratio, c’est à dire l’amplitude en pourcentage de l’entrée déclarée par rapport à l’entrée physique. Un décalage si le neutre n’est pas au centre, une courbe si on souhaite que le mouvement ne soit pas linéaire, la direction. Pour les autres options, on y reviendra plus tard car leur utilisation dépasse largement le cadre d’une introduction.
Pour la sortie, je vais connecter mon servo de direction sur la voie 2 du récepteur. Je vais donc la déclarer comme telle.

La définition d’une sortie est bien plus simple qu’une entrée. On lui donne un nom, on peut choisir dans Direction si la voie doit être inversée, parce que le servo est a l’envers par exemple, des butées min et max si jamais l’amplitude de sortie doit être bridée, une courbe si a nouveau on ne souhaite pas un fonctionnement linéaire, et une longueur d’onde pour le neutre, 1500 étant le neutre dans l’immense majorité des cas.
Plus qu’à lier les 2.
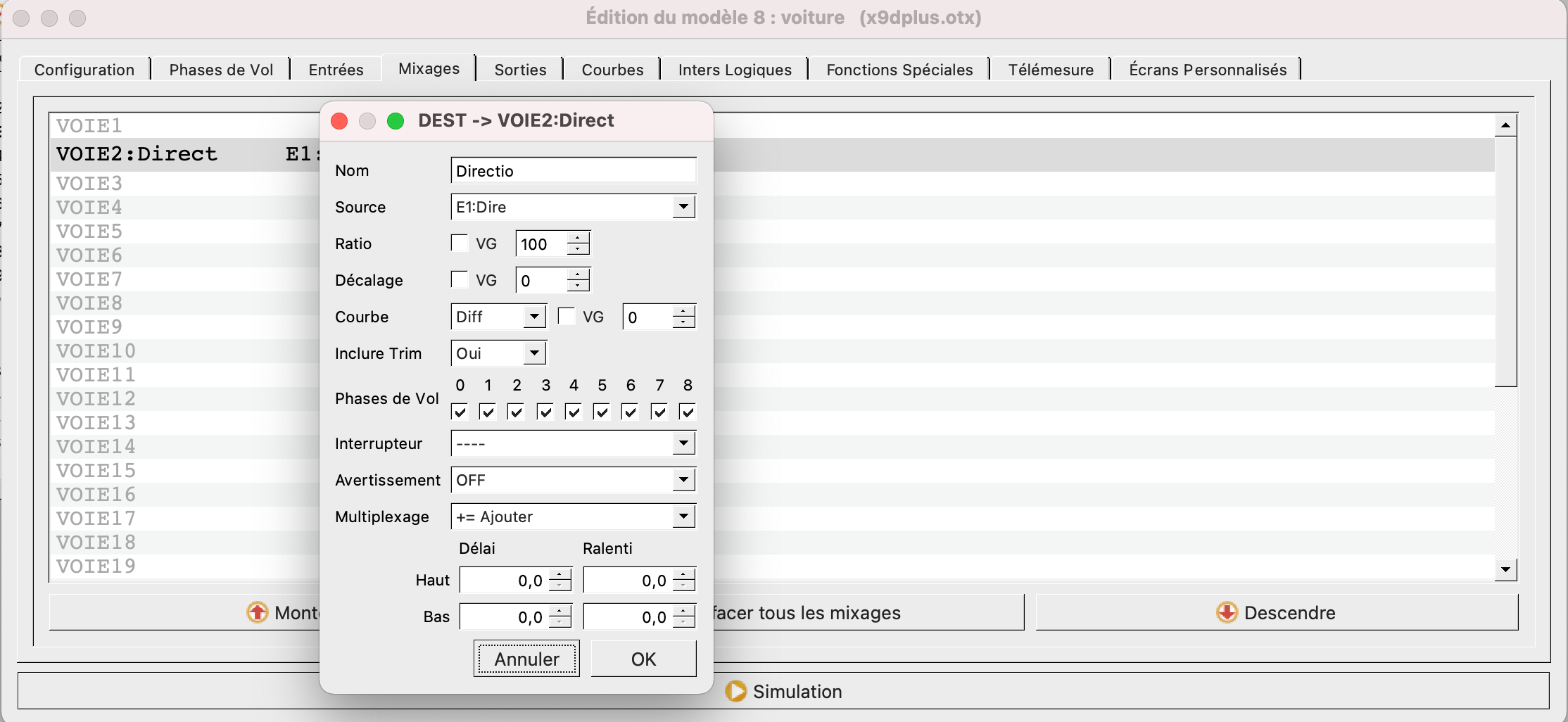
On prend simplement l’entrée E1 comme source, en l’ajoutant sur la ligne de la voie 2, la sortie, et on a terminé la relation manche de direction->voie 2.
Je répète cette opération 8 fois, et j’ai obtenu le résultat de ma première Futaba.
Tout ça pour ça?
Ça paraît bien complexe pour un si piètre résultat. L’avantage des mixages est de pouvoir réaliser des choses plus complexes. Reprenons la direction. Je ne souhaite pas que la direction bouge quand le modèle est à l’arrêt, cela fait forcer inutilement le servo de direction. On va créer un interrupteur logique qui servira de condition au mixage. le mixage aura lieu si la condition est remplie.
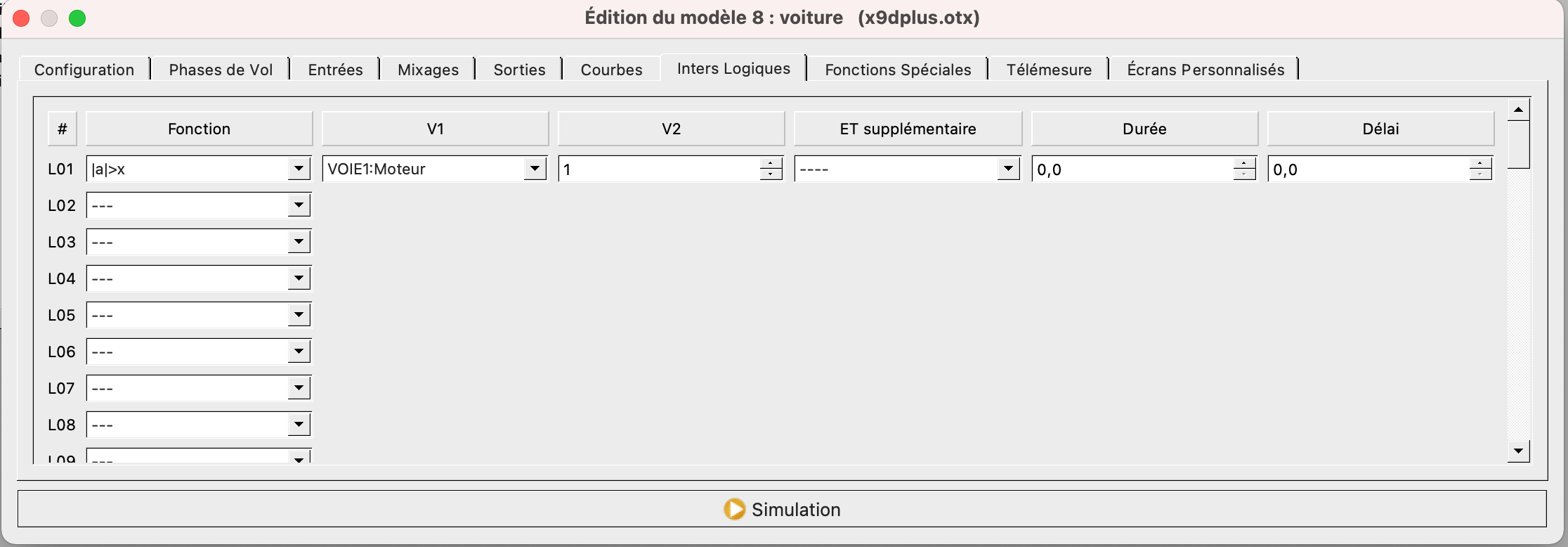
La fonction utilisée est |a|>x, c’est à dire la valeur absolue du paramètre de la fonction doit être plus grande qu’une valeur donnée. Si l’on choisit comme paramètre Voie1: Moteur et 1 comme valeur, le moteur devra avoir une valeur plus grande que 1, ou inférieure à -1, grâce à la valeur absolue, pour que la condition soit vraie, et sera fausse sinon. Autrement dit, cette valeur n’est vraie que si le moteur n’est pas au neutre.
Maintenant que cette condition existe, il faut l’utiliser dans le mixage.
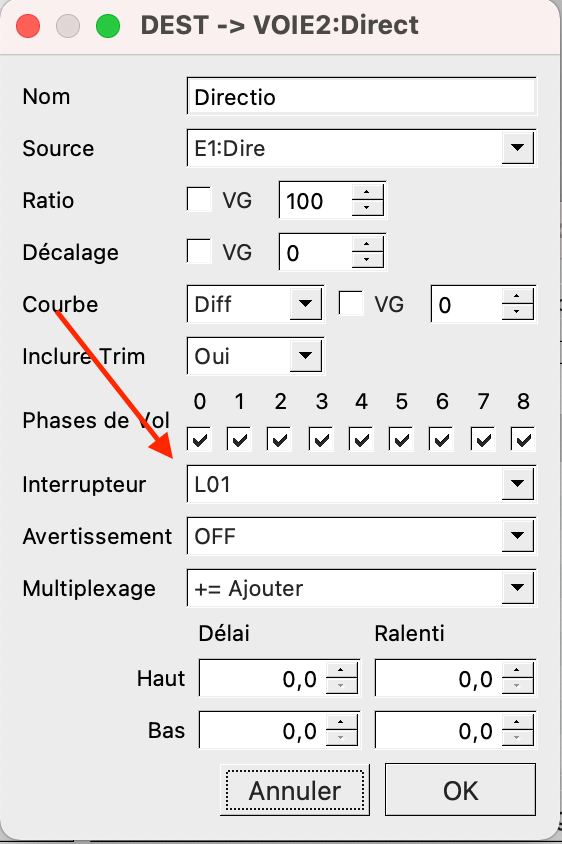
Dorénavant, la direction ne bougera que si le modèle est en mouvement.
Il existe de nombreuses autres options à définir, et d’autres exemples arriveront et ne manqueront pas d’utiliser ces autres options.